Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 8:30 - 17:30, pauza 12:30 - 13:30.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
No products
 View larger
View larger



MPU6050 Accelerometer and Gyroscope Module
0104110000000583
New product
High performance gyroscope and triaxial accelerometer mode.
See description for more details about the product.
Add to cart now!
72 Items
- Write a review
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
More info
Technical specifications
- Supply voltage: 3.3V - 5V (LDO regulator included)
- Bus voltage I2C: 3.3V (MAX)
- Current: 5mA
- Range programmable gyroscope: ± 250, ± 500, ± 1000, ± 2000 o / s
- Programmable Accelerometer Range: ± 2g, ± 4g, ± 8g, ± 16g
- Temperature measuring range: -40oC to + 85oC
- Maximum frequency I2C: 400 kHz
Dimensions: 20mm x 15mm.
The module contains an integrated MPU-6050 circuit with accelerometer, gyroscope and temperature sensor. It communicates on the I 2 C interface , requiring only 2 connections. Every device that uses the I2C interface has its own address. The MPU6050 can select one of two available addresses, linking AD0 to GND or VCC. This connection is usually done on the module board.
It is useful in your projects that need to detect its movement and intensity, such as games, image stabilization, step counter.
To install the libraries required to use the MPU6050 go to: http://cartearduino.ro/v1/link21.1.0
Use with Arduino
Go to the "Arduino" folder and from there download the ZIP folders: I2Cdev and MPU6050. Install Libraries by following the instructions in the "Libraries in Arduino" chapter (Sketch -> Import Library -> Add .ZIP Library ...) and select your files. After installing the libraries, you can find an example of the program among the Arduino demonstration sketches, as illustrated in Figure 1.
The MPU6050 uses the I2C protocol to communicate with the Arduino plate.
INT pins can send interrupt requests - the MPU6050 will announce special events. Every device that uses the I2C interface has its own address. The MPU6050 can select one of the two available addresses, linking AD0 to GND or VCC. This connection is usually done on the mode pad. The assembly is shown in Figure 2. For more details, see the datasheet.
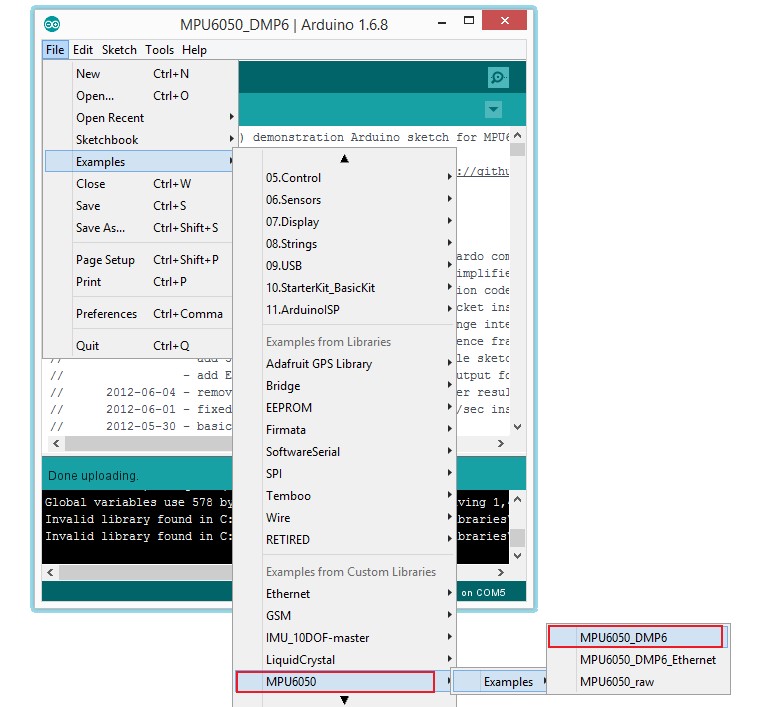
Fig. 1 Uploading the example for the MPU6050 in the Arduino environment
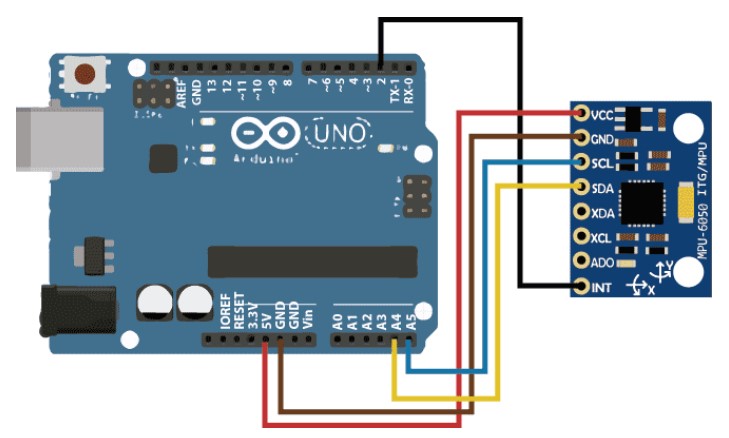
Fig. 2. Connect the MPU6050 to the Arduino board
This program uses complex filtering and data processing algorithms, calculating the angle of inclination of the mode. The data is displayed on the serial terminal. Load the code on the card and open the terminal. Next, select baudrate 115200. The program will send an initialization message (waiting to receive a character from the keyboard) and then display the angles calculated in the order: yaw, pitch, roll.
In the examples provided, you can also find a simpler program (File -> Examples -> MPU6050 -> MPU6050_raw) that displays unmodified accelerometer and gyroscope data. Compare the two programs to observe the difference.
Don't delay, buy today.
Add to cart now!
Reviews
Customers who bought this product also bought:
-
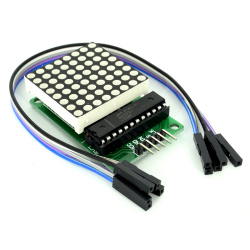
MAX7219 LED...
This module used MAX7219 chip to drive 8 x 8...
17,49 lei
-

Plusivo...
Designed to Fully Power the Raspberry Pi 4: The...
37,99 lei
-

12 V 40 W...
Name: 3D printer single-head electric heating...
6,64 lei
-

SOP8 Test Clamp
SOP8 Test Clamp See description for more...
24,99 lei
-

Infrared...
Infrared Digital Obstacle Sensor Module (3 -...
19,99 lei
-

Suport de...
Suitable for all types of battery assembly...
1,99 lei
-

Insulating...
The unfolded length of a roller is ~ 3 m. See...
8,99 lei
-
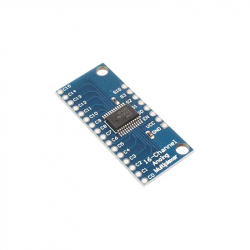
CD74HC4067...
CD74HC4067 16 Channel Analog Multiplexer Module...
5,77 lei
-

YF-S201...
This flowmeter operates on the basis of the...
22,32 lei
-
CP2102 USB...
This module provides simple solutions to update...
19,99 lei