Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 8:30 - 17:30, pauza 12:30 - 13:30.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
No products
 View larger
View larger










47:1 Metal Gearmotor 25Dx52L mm HP 6V
0104110000070128
New product
This gearmotor consists of a high-power, 6 V brushed DC motor combined with a 46.85:1 metal spur gearbox. The gearmotor is cylindrical, with a diameter just under 25 mm, and the D-shaped output shaft is 4 mm in diameter and extends 12.5 mm from the face plate of the gearbox. This gearmotor is also available with an integrated encoder.
Key specifications:
| voltage | no-load performance | stall extrapolation |
| 6V | 200 RPM, 550 mA | 8.5 kg⋅cm (115 oz⋅in), 6.5 A |
See Description for more details about the product.
Don't delay, buy today. Add to cart now!
This product is no longer in stock
- Write a review
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
More info
Overview
These cylindrical brushed DC gearmotors are available in a wide range of gear ratios and with five different motors (two power levels of 6 V motors and three power levels of 12 V motors). The gearmotors all have the same 25 mm diameter case and 4 mm diameter gearbox output shaft, so it is generally easy to swap one version for another if your design requirements change (though the length of the gearbox tends to increase with the gear ratio). Each version is also optionally available with an integrated 48 CPR quadrature encoder..
Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. For these gearboxes, the recommended upper limit for instantaneous torque is 15 kg-cm (200 oz-in); we strongly advise keeping applied loads well under this limit. Stalls can also result in rapid (potentially on the order of a second) thermal damage to the motor windings and brushes, especially for the versions that use high-power (HP) motors; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
In general, these kinds of motors can run at voltages above and below their nominal voltages (they can begin rotating at voltages as low as 1 V); lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor.
Details

Dimensions
The diagram below shows the dimensions of the 25D mm line of gearmotors (units are mm over [inches]). This diagram is also available as a downloadable PDF (171k pdf).
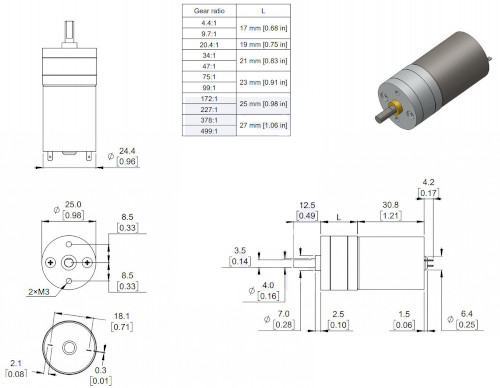
Dimensions of the Pololu 25D mm metal gearmotors without encoders. Units are mm over [inches].
Warning: Do not screw too far into the mounting holes as the screws can hit the gears. We recommend screwing no further than 6 mm (0.24") into the screw hole.
Selecting the right gearmotor
We offer a wide selection of metal gearmotors that offer different combinations of speed and torque.
/07.jpg)
Specifications
Dimensions
| Size: | 25D x 52L mm1 |
| Weight: | 88 g |
| Shaft diameter: | 4 mm |
General specifications
| Gear ratio: | 46.85:1 |
| No-load speed @ 6V: | 200 rpm |
| No-load current @ 6V: | 550 mA2 |
| Stall current @ 6V: | 6500 mA |
| Stall torque @ 6V: | 115 oz·in |
| Motor type: | 6.5A stall @ 6V (HP 6V) |
| Encoders?: | N |
Notes:
1 Length measurement is from gearbox face plate to back of motor (it does not include the output shaft or motor terminals). See dimension diagram for details.
2 Maximum.
Don't delay, buy today.
Add to cart now!
Reviews
Customers who bought this product also bought:
-

75:1 Metal...
This gearmotor consists of a high-power, 6 V...
99,00 lei
-

4mm to 5mm...
This copper coupler can be used for connection...
5,99 lei
-

DPS3012...
DPS3012 Adjustable Power Supply (30 V, 12 A)...
249,98 lei
-

10 A PWM...
This 10 A PWM Driver Module reverse polarity...
22,12 lei
-

2 mm to 4 mm...
This copper coupler can be used for connection...
4,99 lei
-

2 Rows, 2...
2 Rows, 2 Positions Switch See description for...
4,27 lei
-

3 mm to 4 mm...
This copper coupler can be used for connection...
4,99 lei
-

2x150 mm Shaft
Each shaft is 150 mm long and will work with...
1,95 lei
-

XH2.54...
XH2.54 Double Head Cable 8p See description...
3,49 lei