Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 8:30 - 17:30, pauza 12:30 - 13:30.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
No products
 View larger
View larger








34:1 Metal Gearmotor 25Dx67L mm LP 12V with 48 CPR Encoder
0104110000079398
New product
This gearmotor consists of a low-power, 12 V brushed DC motor combined with a 34.014:1 metal spur gearbox, and it has an integrated 48 CPR quadrature encoder on the motor shaft, which provides 1632.67 counts per revolution of the gearbox’s output shaft. The gearmotor is cylindrical, with a diameter just under 25 mm, and the D-shaped output shaft is 4 mm in diameter and extends 12.5 mm from the face plate of the gearbox. This gearmotor is also available without an encoder.
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 12 V | 150 RPM, 100 mA | 3 kg⋅cm (43 oz⋅in), 1.1 A |
See description for more details about the product.
Add to cart now!
This product is no longer in stock
- Write a review
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
More info
Overview
These cylindrical brushed DC gearmotors are available in a wide range of gear ratios and with five different motors (two power levels of 6 V motors and three power levels of 12 V motors). The gearmotors all have the same 25 mm diameter case and 4 mm diameter gearbox output shaft, so it is generally easy to swap one version for another if your design requirements change (though the length of the gearbox tends to increase with the gear ratio). The motor and encoder portion is available by itself (no gearbox) for each combination of power level and nominal operating voltage, and versions without the encoder are also available. See the 25D metal gearmotor datasheet (2MB pdf) for more information, including detailed performance graphs for each gearmotor version.
Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. The recommended upper limit for continuously applied loads is 4 kg⋅cm (55 oz⋅in), and the recommended upper limit for intermittently permissible torque is 8 kg⋅cm (110 oz⋅in). Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
Details

Dimensions
The diagram below shows the dimensions of the 25D mm line of gearmotors (units are mm over [inches]). This diagram is also available as a downloadable PDF (171k pdf).
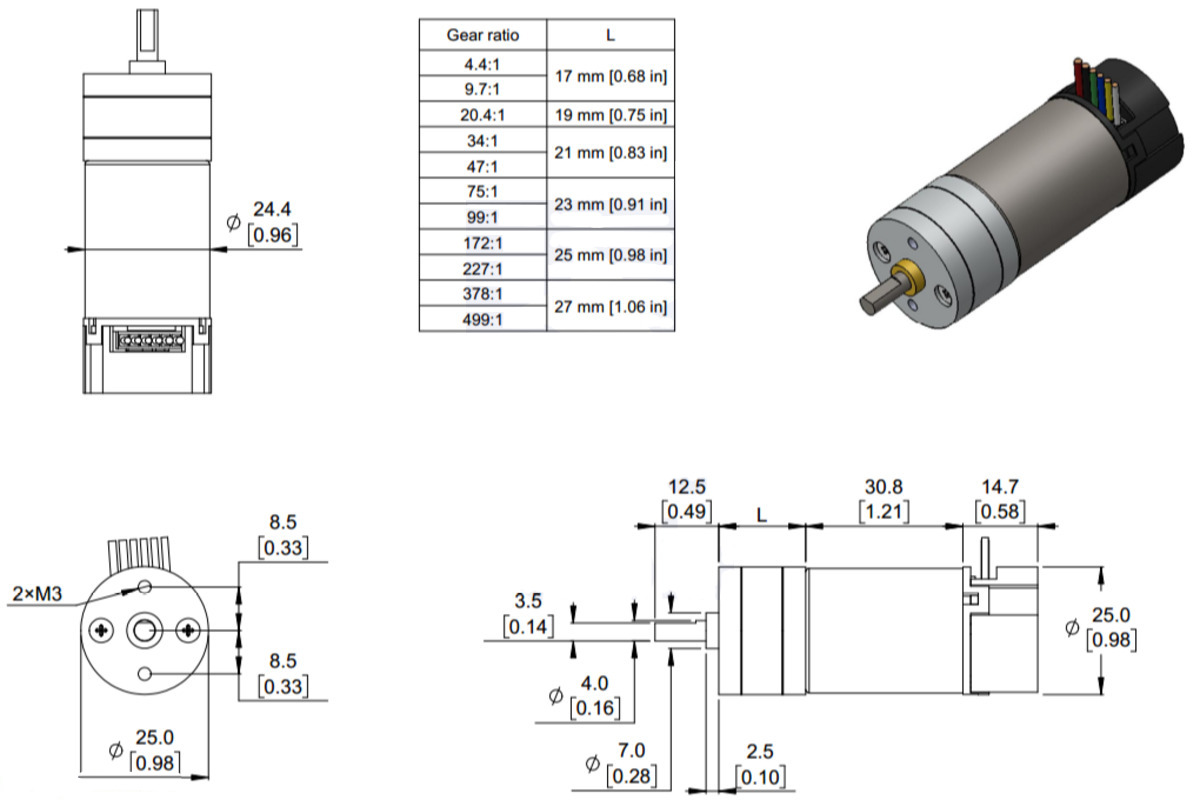
Dimensions of the Pololu 25D mm metal gearmotors with encoders. Units are mm over [inches].
Warning: Do not screw too far into the mounting holes as the screws can hit the gears. We recommend screwing no further than 6 mm (0.24") into the screw hole.
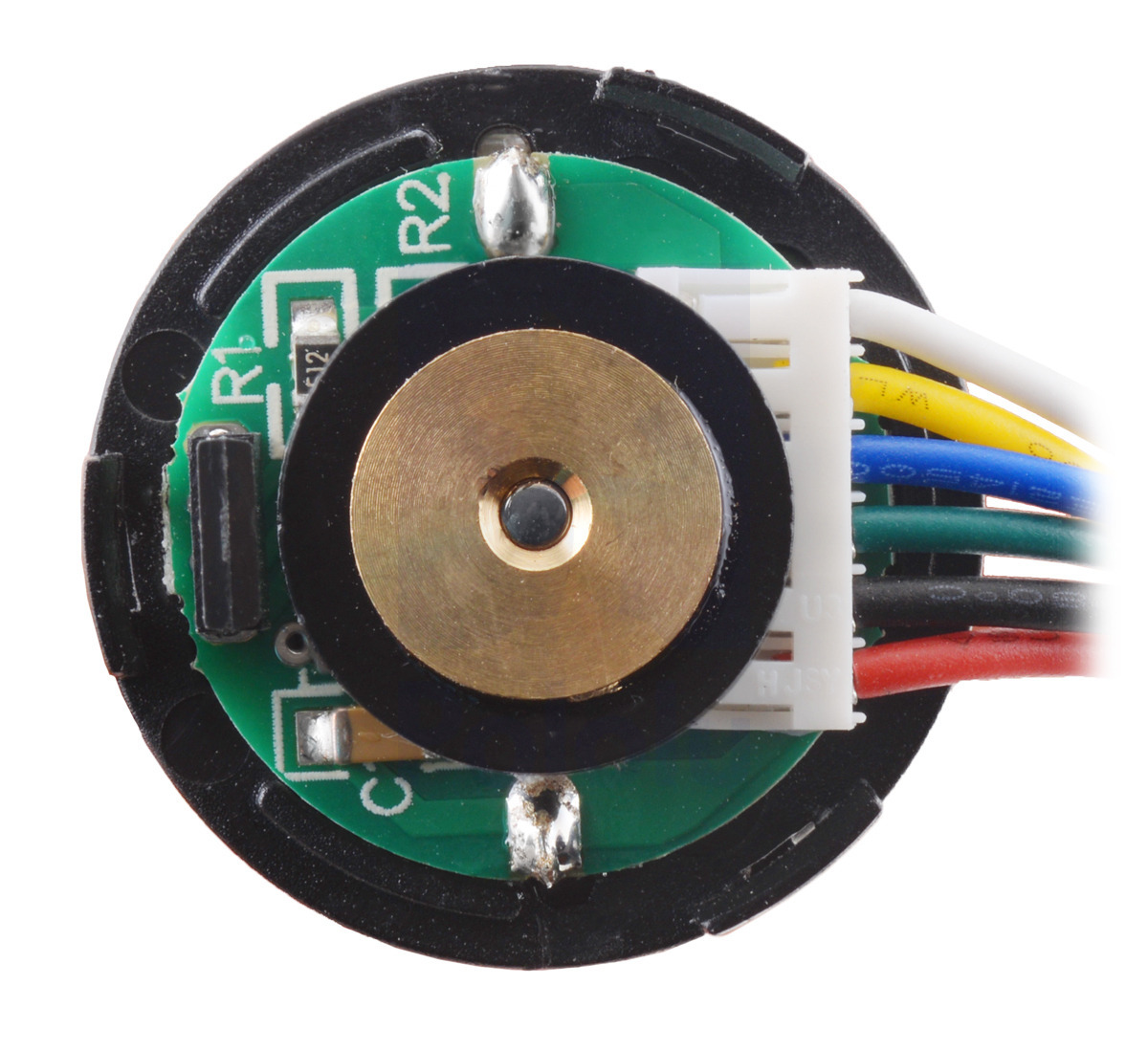
Using the encoder
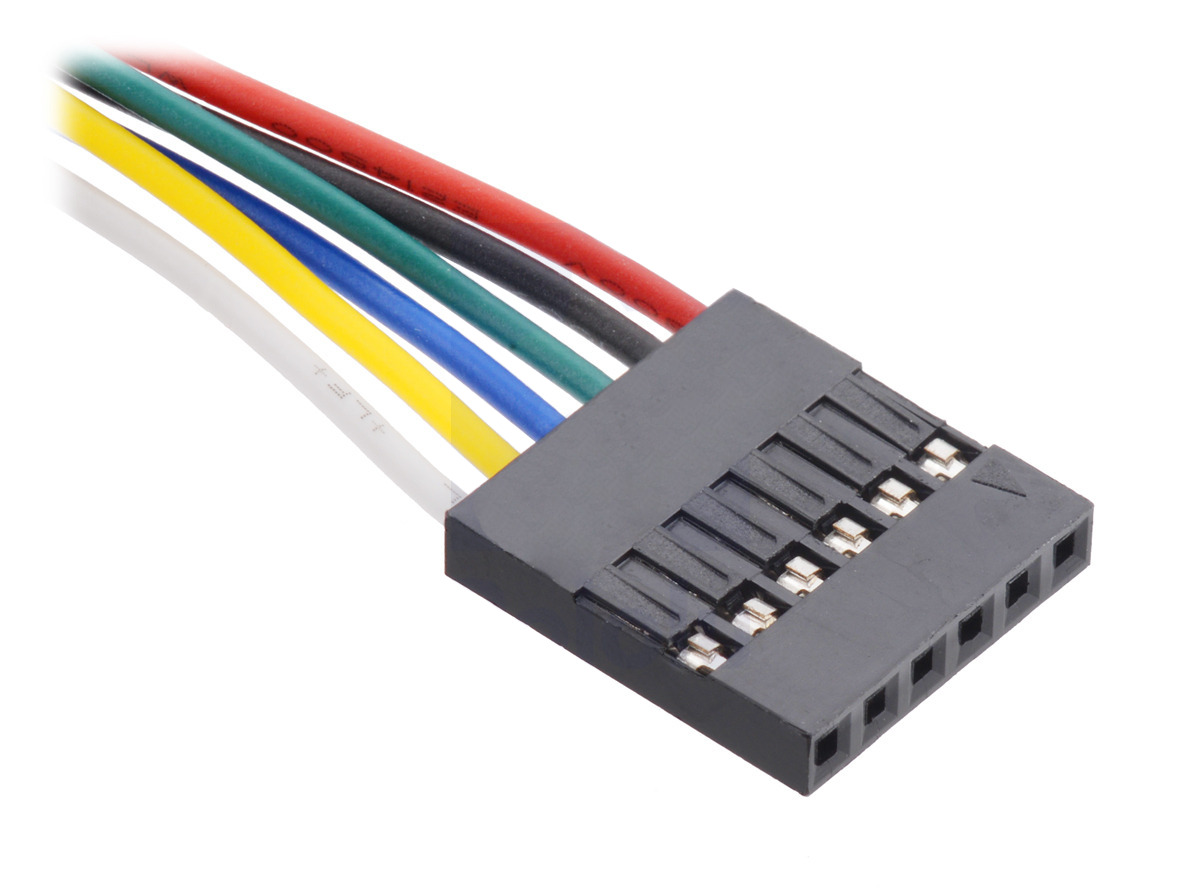
A two-channel Hall effect encoder is used to sense the rotation of a magnetic disk on a rear protrusion of the motor shaft. The quadrature encoder provides a resolution of 48 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output, multiply the gear ratio by 48. The motor/encoder has six color-coded, 8" (20 cm) leads terminated by a 1x6 female header with a 0.1" pitch, as shown in the main product picture. This header works with standard 0.1" male headers and our male jumper and precrimped wires. If this header is not convenient for your application, you can pull the crimped wires out of the header or cut the header off. The following table describes the wire functions:
| Color | Function |
| Red | motor power (connects to one motor terminal) |
| Black | motor power (connects to the other motor terminal) |
| Green | encoder GND |
| Blue | encoder Vcc (3.5 V to 20 V) |
| Yellow | encoder A output |
| White | encoder B output |
The Hall sensor requires an input voltage, Vcc, between 3.5 and 20 V and draws a maximum of 10 mA. The A and B outputs are square waves from 0 V to Vcc approximately 90° out of phase. The frequency of the transitions tells you the speed of the motor, and the order of the transitions tells you the direction. The following oscilloscope capture shows the A and B (yellow and white) encoder outputs using a motor voltage of 6 V and a Hall sensor Vcc of 5 V:
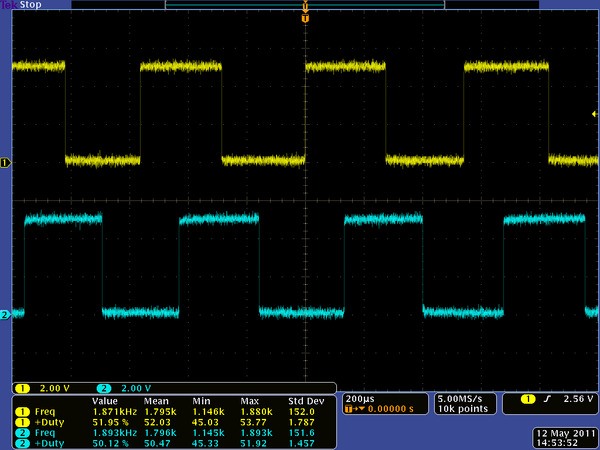
Encoder A and B outputs for 25D mm HP 6V metal gearmotor with 48 CPR encoder (motor running at 6 V).
By counting both the rising and falling edges of both the A and B outputs, it is possible to get 48 counts per revolution of the motor shaft. Using just a single edge of one channel results in 12 counts per revolution of the motor shaft, so the frequency of the A output in the above oscilloscope capture is 12 times the motor rotation frequency.
Selecting the right gearmotor
We offer a wide selection of metal gearmotors that offer different combinations of speed and torque.

Specifications
Dimensions
| Size: | 25D x 67L mm1 |
| Weight: | 101 g |
| Shaft diameter: | 4 mm2 |
General specifications
| Gear ratio: | 34.014:1 |
| No-load speed @ 12V: | 170 rpm3 |
| No-load current @ 12V: | 0.060 A4 |
| Stall current @ 12V: | 0.90 A5 |
| Stall torque @ 12V: | 3.7 kg·cm5 |
| Max output power @ 12V: | 1.6 W |
| No-load speed @ 6V: | 85 rpm6 |
| Stall current @ 6V: | 0.45 A6 |
| Stall torque @ 6V: | 1.9 kg·cm6 |
| Motor type: | 12V, 0.9A stall (LP 12V) |
Performance at maximum efficiency
| Max efficiency @ 12V: | 42 % |
| Speed at max efficiency: | 140 rpm |
| Torque at max efficiency: | 0.50 kg·cm |
| Current at max efficiency: | 0.14 A |
| Output power at max efficiency: | 0.73 W |
Notes:
1 Length measurement is from gearbox face plate to back of encoder cap (it does not include the output shaft). See dimension diagram for details.
2 D shaft.
3 Typical; ±20%.
4 Typical, ±50%; no-load current depends on internal friction, which is affected by many factors, including ambient temperature and duration of motor operation.
5 Stalling is likely to damage the gearmotor. Stall parameters come from a theoretical extrapolation of performance at loads far from stall. As the motor heats up, as happens as it approaches an actual stall, the stall torque and current decrease.
6 This motor will run at 6 V but is intended for operation at 12 V.
7 May vary by a few inches.
Don't delay. Buy today.
Add to cart now!
Reviews
Customers who bought this product also bought:
-

Connector...
Complete Connector Kit: single row pin...
$14.40
-

24 V 5 A...
Switching voltage source 24 V 5 A (120 W) See...
$12.00
-

12 V 10 A...
Source Voltage Switching 12 V 10 A (120 W) See...
$10.80
-

GT2-6mm Belt...
No. of teeth: 30 Bore Diameter (mm): 5 Outer...
$2.40
-

Plusivo LED...
Includes 4 different colors of round head Light...
$9.60
-

GT2-6mm Belt...
No. of teeth: 60 Bore Diameter (mm): 5 Outer...
$4.08
-

12 V 5000 mA...
12 V 5000 ma Stabilized Power Supply See...
$9.60