Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 8:30 - 17:30, pauza 12:30 - 13:30.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
No products
 View larger
View larger




ES08MA Metal Servomotor
0104110000007087
New product
The main advantages of this engine are it only weighs 12 grams, but it's a small size servo with metal gears.
See description for more details about the product.
Add to cart now!
This product is no longer in stock
- Write a review
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
More info
Description
The main advantages of this engine are it only weighs 12 grams, but it's a small size servo with metal gears.
Actuators are used in a wide variety of applications where accuracy is required. This type of actuator is very common, small, and you can use the finesse applications, where you need precision or remote-controlled toy carts to move the front wheels in curves.
An advantage over stepper motors is the fact that when they are empty, servo motors do not consume, nor can keep shaft blocked.
Specifications
- Operating voltage: 4.8 V to 6 V
- Supply Voltage: 4.8 V - 8.8m, 6V - 9.1 m (goal)
- Stall Current: 4.8 V - 350 mA, 6 V - 450 mA
- Speed: 0.12 s / 60o (4.8V), 0.1 s / 60o (6V)
- Torque: 1.6 kgf · cm (4.8V), 2 kgf · cm (6V)
- Dimensions: 23 x 11.5 x 24 mm
Use with Arduino
If the actuator is driven to be positioned at an angle, but because of inertia will rotate a little longer than desired, the control circuit inside the actuator will refer to the potentiometer to check this matter. The potentiometer measures its position and the control circuit will quickly correct the error. Also, if we try to change forcibly (mechanically) at actuator position has been set, it will resist. This makes it ideal for servo applications where precise control is needed, such as robotic arms.
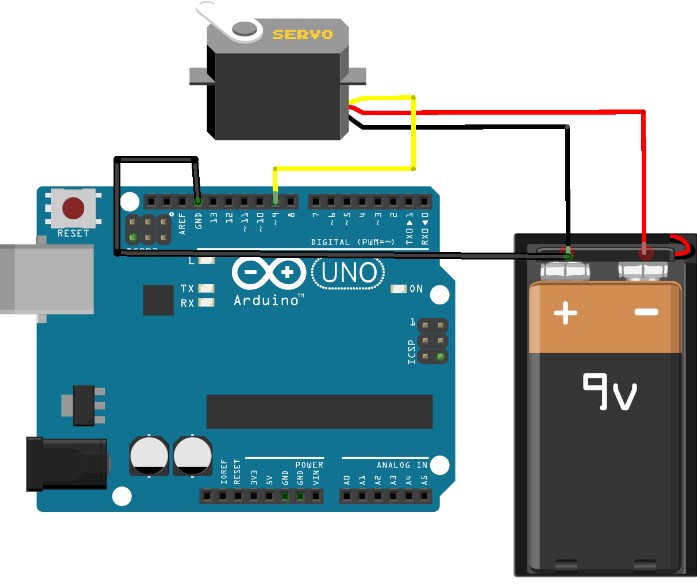
There are three wires connection: GND, 5V and a line for command, which we will connect to an Arduino pin PWM plate. It is not recommended to directly supply the board Arduino in the case of DC motors. If we're going to use a 9 V battery, negative battery cable must be connected to GND on the board.
Most times, actuator terminals will comply with the code shown below (yellow - control, black - GND, red). To check this and other parameters to see your engine features, you can see the data sheet provided by the manufacturer. In it, you will find other information, such as rotational speed, torque and power supply recommended.
Perhaps the biggest advantage of the Arduino open-source community is to, with numerous examples and libraries. Use Servo.h library for control actuator. It allows us to declare up to 8 objects of type Servo and use functions associated with these items as attach (pin) to indicate the object to which pin communicate or write (position) to directly control the position servo (on pin indicated attach method () will generate a PWM control actuator).
So an object is an instance of programming languages (variable of some type) can have data and functions (methods) specific.
The previous program actuator to achieve movement control from 0 to 180 degrees in both directions.
Using a mechanical kit for 2-axis positioning (see picture below) and two actuators, you could easily build a robotic arm. You can use a joystick to control.
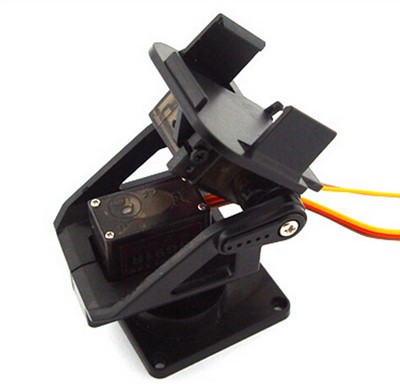
Two-axis positioning system
Don't delay, buy today.
Add to cart now!
Reviews
Customers who bought this product also bought:
-

5 mm x 8 mm...
This 5 x 8 flexible coupling coupler is used in...
5,92 lei
-
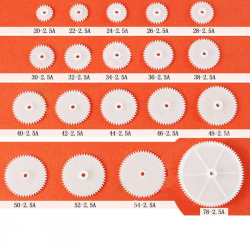
36-2.5A...
This is a plastic gear for your RC toys, cars,...
1,45 lei
-

Male Power...
Its screw terminals ensure best connection of...
0,99 lei
-

Receiver...
Very efficient laser diode receiver. See...
6,95 lei
-

Pan and Tilt...
This is a pan and til kit suitable for...
3,49 lei
-
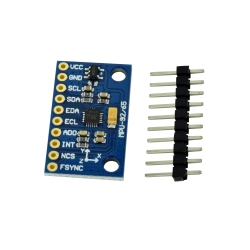
MPU6500...
This MPU6500 module integrates a 3-axis...
19,99 lei
-

Plate for...
This plate can replace a damaged one or can...
3,49 lei
-
ACS712 30 A...
ACS712 30 A Current Sensor See description for...
9,97 lei
-

AT24C256 I2C...
The AT24C256 EEPROM module can be used to store...
8,99 lei
-
0.25 W 220 Ω...
0.25 W 220 Ω Resistor See description for more...
0,10 lei